The integration of robotics within various industries has transformed operations significantly, with the automotive sector being a primary beneficiary. However, as technology progresses, the potential of robots has begun to extend into diverse fields, particularly logistics. While this transition indicates progress, the current capabilities of robots still exhibit glaring limitations. They predominantly execute predefined tasks repetitively and often lack the nuanced adaptability that humans display in similar scenarios.
Redefining Robotics: The Need for Human-Like Skills
To harness their full potential, robots must evolve to demonstrate qualities akin to human dexterity, spatial awareness, and the ability to swiftly adapt to unexpected changes. Alessandro Saccon, an Associate Professor in Nonlinear Control and Robotics at Eindhoven University of Technology (TU/e), emphasizes the importance of fast physical interactions. This evolution is particularly significant in high-risk environments where human intervention could be detrimental to safety and health. Take, for instance, the handling of heavy luggage in busy airports or the manipulation of materials within hazardous nuclear facilities. In these scenarios, enhancing robotic capabilities can substantially mitigate risks.
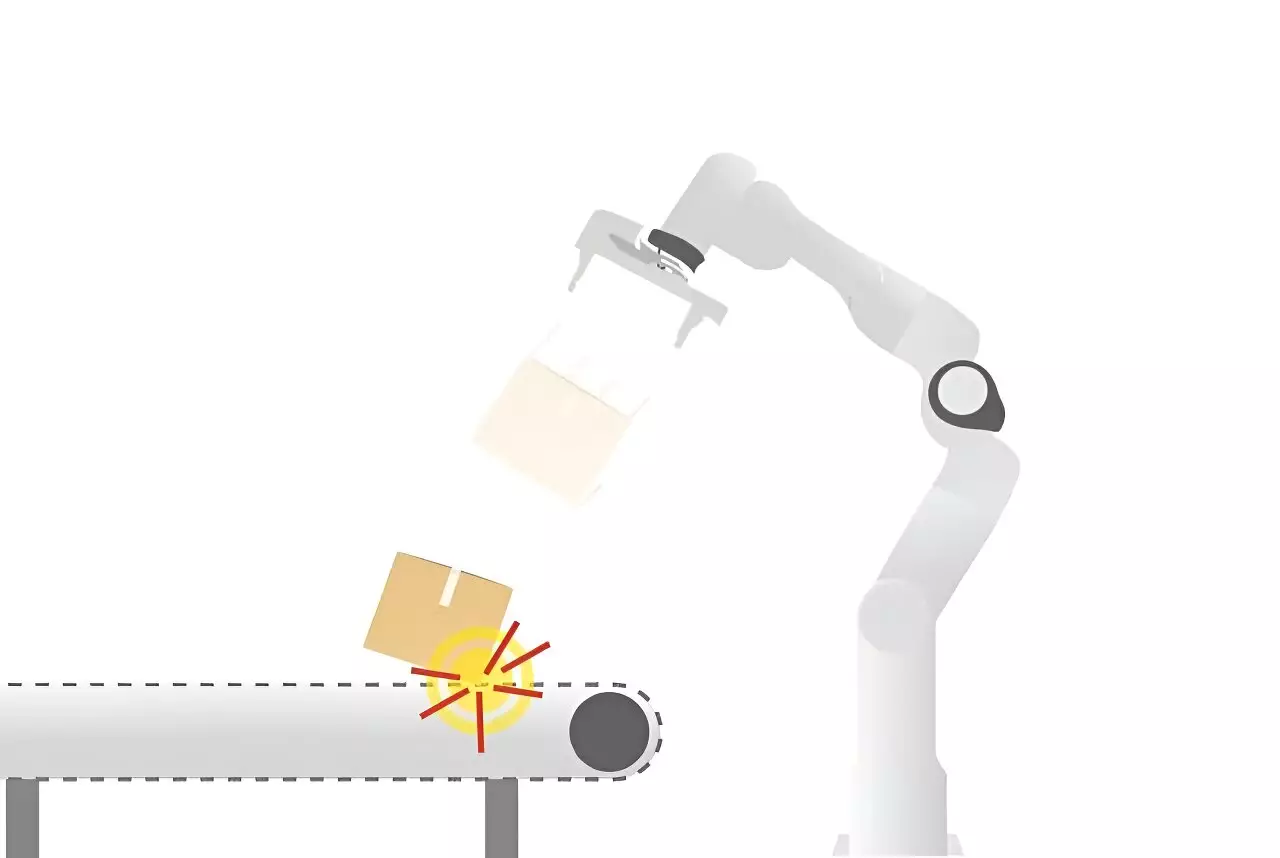
There is an expanding ambition to deploy robots for extraterrestrial exploration as well, showcasing their potential in environments that are unwelcoming or impossible for human traversing. However, robots traditionally struggle with dynamic interaction. Typically programmed for careful execution, robots today must shift to a model that embraces impact — a significant leap from current practices focused on collision avoidance.
In light of these challenges, the I.AM project was established to promote the development of impact-aware robots. The project’s core objective revolved around enabling robots to predict and respond adequately to rapid interactions with substantial objects. Recognizing the shortcomings of current robotic systems, the initiative sought to explore how robots could effectively and reliably manage unpredictable encounters while still ensuring efficient performance.
The intricacies of human interactions — swift, calculated, and often instinctual — raise pertinent questions about how machines can replicate such fluidity. With traditional designs shying away from situations that could lead to collisions, the I.AM project took an unconventional turn by focusing on the strategic utilization of impact. This paradigm shift led to explorations on how to adapt robot movements to address discrepancies in object weight and misalignment, which are common in real-world settings.
Advancing Algorithms and Real-World Testing
The project employed rigorous methods, combining first-principle physics calculations with comprehensive simulations to assess robotic behavior accurately. While no simulation can completely mimic real-world interactions, the insights gained from testing algorithms against actual outcomes proved invaluable. Throughout this iterative process, researchers focused on integrating real-time data feedback to refine their control algorithms, ensuring robustness in unpredictable environments.
One notable discovery was how to create a control system that allows a robot to efficiently and safely grasp heavy objects using dual arms while accounting for the dynamics of impact. Understanding the interplay of mass, friction, and real-time data enables researchers to engineer systems that make robots more capable of nuanced tasks.
An integral part of the I.AM project involved engaging with industry partners, one such collaborator being VanderLande, a leader in logistically optimizing operations at airports and warehouses. This partnership, bolstered by a shared lab environment at TU/e, fostered close collaboration and practical experimentation, bridging the gap between theoretical research and real-world application. Striking this balance has been essential for both student learning and advancing industry practices.
As strides are made in robotics in the Netherlands, the contributions extend beyond local borders. A concerted effort in research and development, particularly in medical and mobile robotics, is gaining traction internationally. Projects like I.AM prove essential as they not only enhance capabilities but also underscore the country’s prominence in global discussions on robotics.
With the foundation laid by the current project, future inquiries will zero in on aspects unaddressed, such as advanced perception and rapid planning capabilities. Saccon notes the vital role of maintaining relationships with industry stakeholders to explore collaborative avenues that can materialize advanced insights into robotics. This momentum creates a fertile ground for innovation, as many of the students who participated in the project are now contributing their expertise in partnering companies, cultivating growth and evolution in the robotics field.
The path ahead invites both challenges and opportunities. While increased visibility and expectations call for a broader engagement in project management, there lies a sense of excitement about future advancements in robotic technology. The journey promises not only enhanced operational efficiencies but also the potential to redefine interactions between humans and machines, steering society toward a future where robots and humans coexist harmoniously.
Leave a Reply