Recent advancements in materials science have led to the development of sophisticated materials for robotic and prosthetic applications. One such innovation is the introduction of electronic skins, also known as e-skins, which are designed to sense the surrounding environment and replicate the sense of touch artificially. A new dual-modal tactile e-skin has been introduced by researchers at Tsinghua University, offering enhanced sensing capabilities for robots and facilitating bidirectional touch-based human-robot interactions.
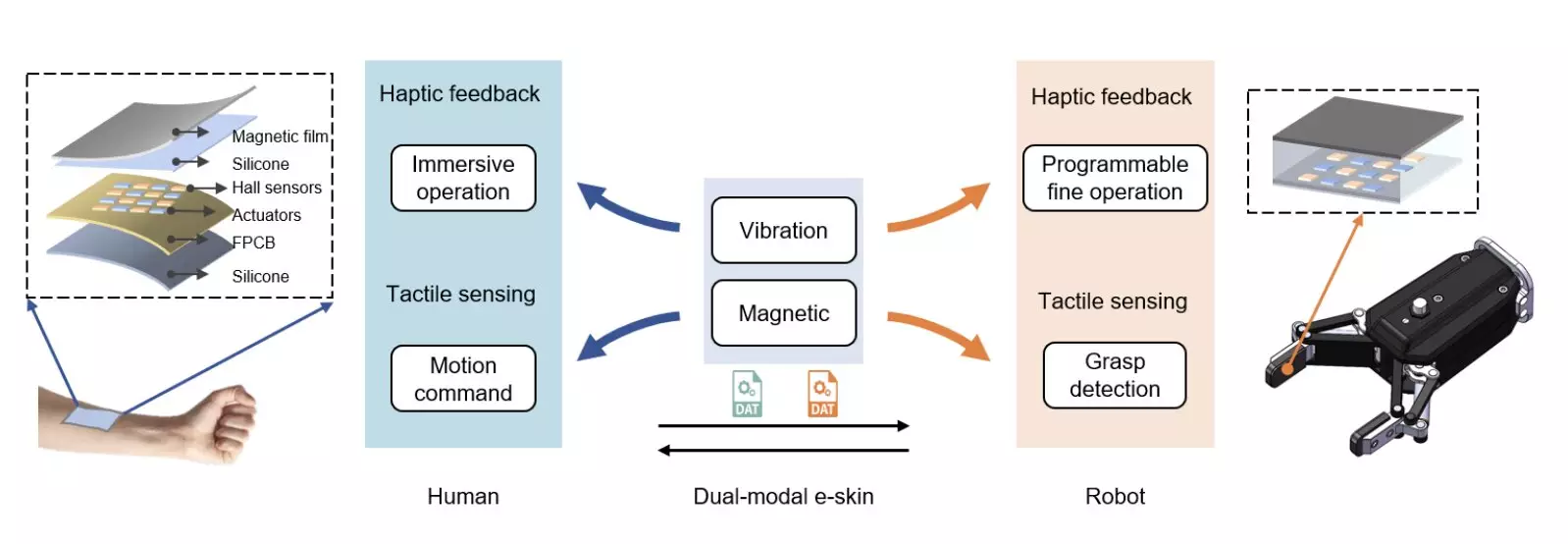
The primary objective of the study conducted by Dr. Wenbo Ding and his colleagues was to address the limitations of current electronic skin technology, which either provides tactile perception or tactile feedback, but not both. The dual-modal electronic skin integrates multimodal magnetic tactile sensing with vibration feedback, combining the detection of tactile information with the production of tactile feedback. This integration is achieved through the use of a flexible magnetic film, silicon elastomer, Hall sensor array, actuator array, and microcontroller unit.
Dr. Ding and his team conducted experiments to test the functionality of the prototype dual-modal tactile e-skin. The results of the experiments highlighted the effectiveness of the e-skin in sensing tactile information and producing tactile feedback. The e-skin showed promise in various applications, including object recognition, precise weighing, and immersive human-robot interactions. The weighing experiment, in particular, showcased the innovative use of tactile vibrations, offering enhanced control accuracy and meeting daily cooking and industrial weighing requirements at a low cost.
The dual-modal tactile e-skin introduced by Dr. Ding and his colleagues holds great potential for deployment in a variety of settings. It could advance robotic manipulation, improve control precision in industrial robots, and contribute to the development of advanced prosthetic limbs. Future research and development efforts will focus on miniaturizing e-skin components for broader applications, incorporating new sensing modalities such as temperature sensing, and adding auditory feedback to enhance the human-robot interaction experience.
Overall, the development of the dual-modal tactile e-skin represents a significant advancement in the field of human-computer interaction, offering new possibilities for enhancing sensory perception and feedback in robotics and prosthetics. The integration of magnetic tactile sensing and vibration feedback in a single device demonstrates the potential for creating more seamless and immersive interactions between humans and robots. The innovative applications and low cost of the e-skin further highlight its value in a wide range of practical scenarios, paving the way for future advancements in the field.
Leave a Reply