The development of soft robotics has ushered in a new era of flexible, safe, and adaptable machines capable of interacting seamlessly with both humans and delicate objects. At the heart of this innovation are fabric-based soft pneumatic actuators (FSPAs), devices that change shape or movement through the application of controlled pressure. These actuators, which inflate and deflate to create motion, have become essential due to their lightweight and pliable construction, opening pathways for applications ranging from wearable technologies to robotic grippers and adaptive shelters. However, the journey toward creating effective FSPAs is fraught with challenges related to design optimization and material selection.
Traditional methodologies in soft actuator design often depend on a process of trial and error, making it both laborious and time-consuming. Researchers typically utilize isotropic materials, known for their uniform deformation, which results in consistent yet limited functionality. Methods like stitching geometric features seek to enable morphing; however, these can produce less-than-ideal results when it comes to achieving controlled and reliable movements. As such, the soft robotics community has been clamoring for an innovative approach to overcome the limitations of existing technologies.
A landmark study by researchers from Toyota Central R&D Labs and Toyota Motor Engineering & Manufacturing has introduced a perspective by employing Turing patterns, originally theorized by mathematician Alan Turing in 1952. Turing’s work on morphogenesis explains how simple reaction-diffusion mechanisms can generate complex patterns—like the stripes of a zebra—through interaction between two substances. By embodying these concepts into FSPAs, the researchers aimed to create a method to design soft actuators that are not only effective but also cost-efficient to produce.
According to the researchers, Dr. Masato Tanaka and Dr. Tsuyoshi Nomura, the key was to focus on the anisotropic nature of materials, which varies in behavior based on the direction of application, unlike isotropic materials whose properties are uniform in all directions. This understanding brings a much-needed dimension to actuator design.
Implementing Turing patterns into FSPA design involves a sophisticated process known as gradient-based orientation optimization. This technique reorients the fibers of the actuator’s fabric to achieve desirable morphological characteristics without extensive prototyping. The researchers leveraged mathematical modeling rooted in anisotropic reaction-diffusion equations to generate intricate pattern layouts that guide the deformation of the actuators under pressure.
Dr. Yuyang Song elaborated on this process, emphasizing the futuristic approach of blending optimization methodologies with 3D printing capabilities. This not only enhances design fidelity but also promotes scalability—an essential trait when considering industrial applications. By streamlining design processes and automating techniques, the team has effectively reduced the reliance on painstaking trial and error in actuator manufacturing.
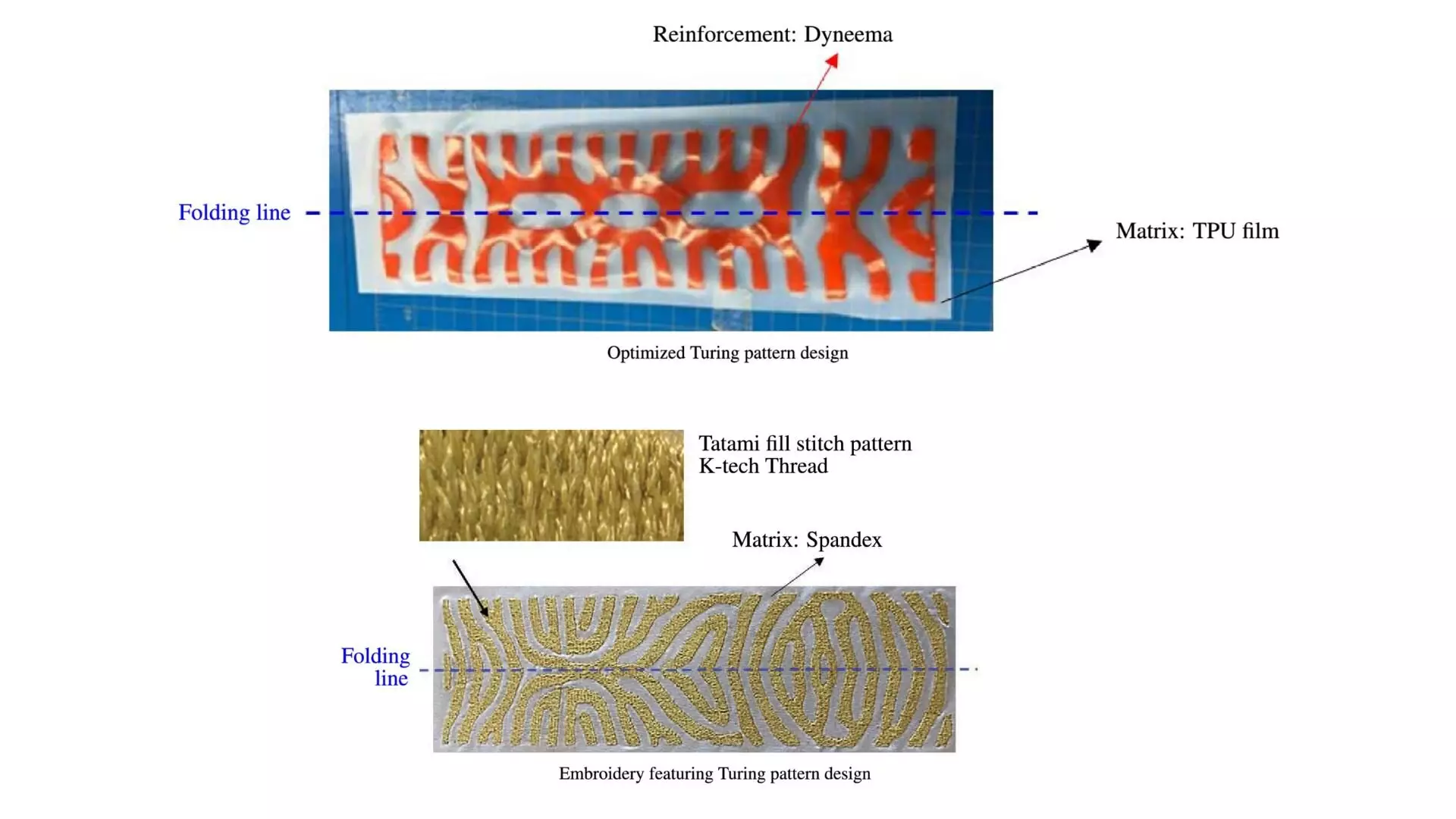
In realizing the potential of their Turing-inspired designs, the team experimented with various fabrication techniques, notably heat bonding and embroidery. Using heat bonding, layers of fabric are laser-cut into the desired Turing pattern before being heat-pressed onto softer substrates, effectively creating versatile actuator components. Meanwhile, the embroidery approach incorporates rigid threads to produce fabric sections of differing stiffness, which are crucial for nuanced movement capabilities.
The researchers conducted thorough performance comparisons between their Turing pattern designs and classic actuator models. Notably, their Turing pattern designs outperformed traditional configurations, showing enhanced performance and efficiency in multiple motion paradigms, including C-shaped bending and twisting motions. These advancements not only confirm the viability of Turing patterns in actuator design but also hint at the limitless potential of optimizing soft robotics.
Looking ahead, the researchers envision exciting potential to further integrate Turing pattern designs with revolutionary materials like shape-memory alloys or electroactive polymers. Such combinations could yield FSPAs with even more sophisticated movement capabilities and improved operational dynamics. As they explore mass production avenues and refine their automated fabrication techniques, the field is poised to see a dramatic evolution in the applications and performance of soft pneumatic actuators.
The marriage of Turing patterns with soft robotics signifies a promising advancement in design methodologies that not only enhances actuator performance but can also broaden the horizons for future applications, making robotics more accessible and effective in diverse environments.
Leave a Reply