In an era where automation and artificial intelligence continue to reshape industries, the challenge of teaching robots to navigate human environments effectively looms large. The ability of humans to casually reach for an object on a shelf involves a remarkable interplay of cognitive functions that robotics researchers have struggled to mimic. Known as motion planning, this intricate process combines sensory input, spatial awareness, and decision-making—the very essence of human adaptability in dynamic environments.
For robots, however, navigating unfamiliar spaces presents a complex hurdle. The prevailing strategies often necessitate extensive computational resources and time, as traditional motion planning algorithms fall short in their ability to react adaptively to newly encountered obstacles. This lack of agility often results in a laborious preprogramming phase where robots must account for every potential collision, a scenario that adds layers of inefficiency to robotic systems.
Carnegie Mellon University’s Breakthrough
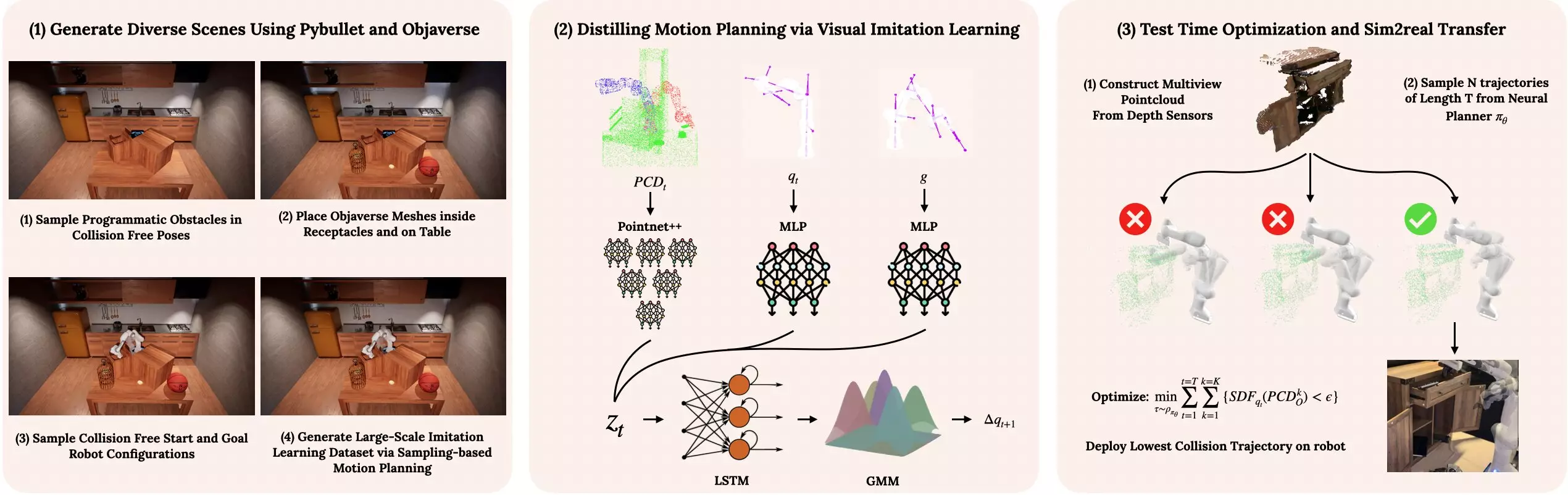
A research team at Carnegie Mellon University’s Robotics Institute has made significant strides in overcoming these limitations through their innovative approach known as Neural Motion Planning. Unlike classic algorithms that rely on extensive pre-configuration and collision checking, this method leverages the power of artificial intelligence to create a more responsive robot behavior in unstructured environments, such as homes filled with various objects and obstructions.
Murtaza Dalal, a doctoral student at the Robotics Institute, highlights the core advantage of this approach: “In coarse conditions where predictability is low, conventional motion planning methods tend to flounder. The Neural Motion Planning framework allows us to simulate and train robots to adapt to unforeseen circumstances with agility.” This advancements reflect an essential evolution in the realm of robotic systems, blending human-like characteristics into robotic operation.
What sets Neural Motion Planning apart is its reliance on data-driven techniques. Researchers simulate millions of diverse scenarios that a robot might encounter in a domestic setting. These simulations encompass a wide variety of environments—from cluttered kitchens to chaotic living rooms—where the robots face unexpected challenges, such as pets darting across their path or items being out of place.
This extensive training regimen allows the models to cultivate an innate sense of situational awareness and reaction, mimicking the learning trajectory witnessed in humans. As Deepak Pathak, a Raj Reddy Assistant Professor at the Robotics Institute, succinctly puts it, “Rather than relying on narrowly defined algorithms, we generated a comprehensive framework capable of generalizing across varying conditions.”
Upon deploying this innovative framework in actual environments, researchers found an impressive degree of proficiency in the robotic arm’s navigation capabilities. Built with depth cameras that provided a three-dimensional perception of their surroundings, the robots were tasked with moving from a designated starting point to a specified goal while adeptly avoiding any obstacles in their path.
The resulting performance was groundbreaking. The robotic arm could seamlessly dodge lamps, plants, and cabinet doors, showcasing not only improved dexterity but also a remarkable sense of spatial awareness. This operational flexibility opens doors to a myriad of applications, from household chores to sophisticated industrial tasks.
Beyond its immediate successes, Neural Motion Planning holds profound implications for the future of robotics. As AI technology advances, the potential for robots to operate in real-world scenarios—where unpredictability reigns—could transform sectors ranging from healthcare to logistics. The foundational work pioneered by Carnegie Mellon University may serve as a springboard for further innovations in this field.
Neural Motion Planning signifies a pivotal shift in our understanding of robot adaptability. By incorporating principles of human learning and experience, researchers are forging a path toward more intelligent machines capable of navigating the complexities of everyday life. This represents not only an academic achievement but also a significant step toward a future where humans and robots coexist and collaborate effortlessly.
Leave a Reply