The development of self-driving vehicles has been a long-standing goal in both robotics and the automotive industry. Companies have been investing heavily in this technology, with the hope of implementing it in various settings. One recent area of interest is automated valet parking (AVP), where a car can autonomously navigate from the entrance of a parking lot to an available parking spot. While the concept has garnered significant attention, the reliable implementation of this technology has been a challenge.
The Innovation of OCEAN Planner
Researchers at Mach Drive in Shanghai have made significant strides in this area with the development of OCEAN, an Openspace Collision-freE trAjectory plaNner for autonomous parking. Unlike previous approaches, the OCEAN planner is designed to address the shortcomings of existing methods. It incorporates an optimization-based trajectory planner accelerated by the Alternating Direction Method of Multiplier (ADMM), which enhances computational efficiency and robustness.
Overcoming Limitations
One of the key limitations of previous approaches to autonomous parking is the inability to accurately predict collisions and poor real-time performance. The OCEAN planner builds on the Hybrid Optimization-based Collision Avoidance (H-OBCA) method, improving collision avoidance, robustness, and speed in real-time scenarios. By utilizing a hierarchical optimization-based collision avoidance framework and formulating the problem as smooth and convex, the OCEAN planner significantly enhances the overall performance of autonomous parking.
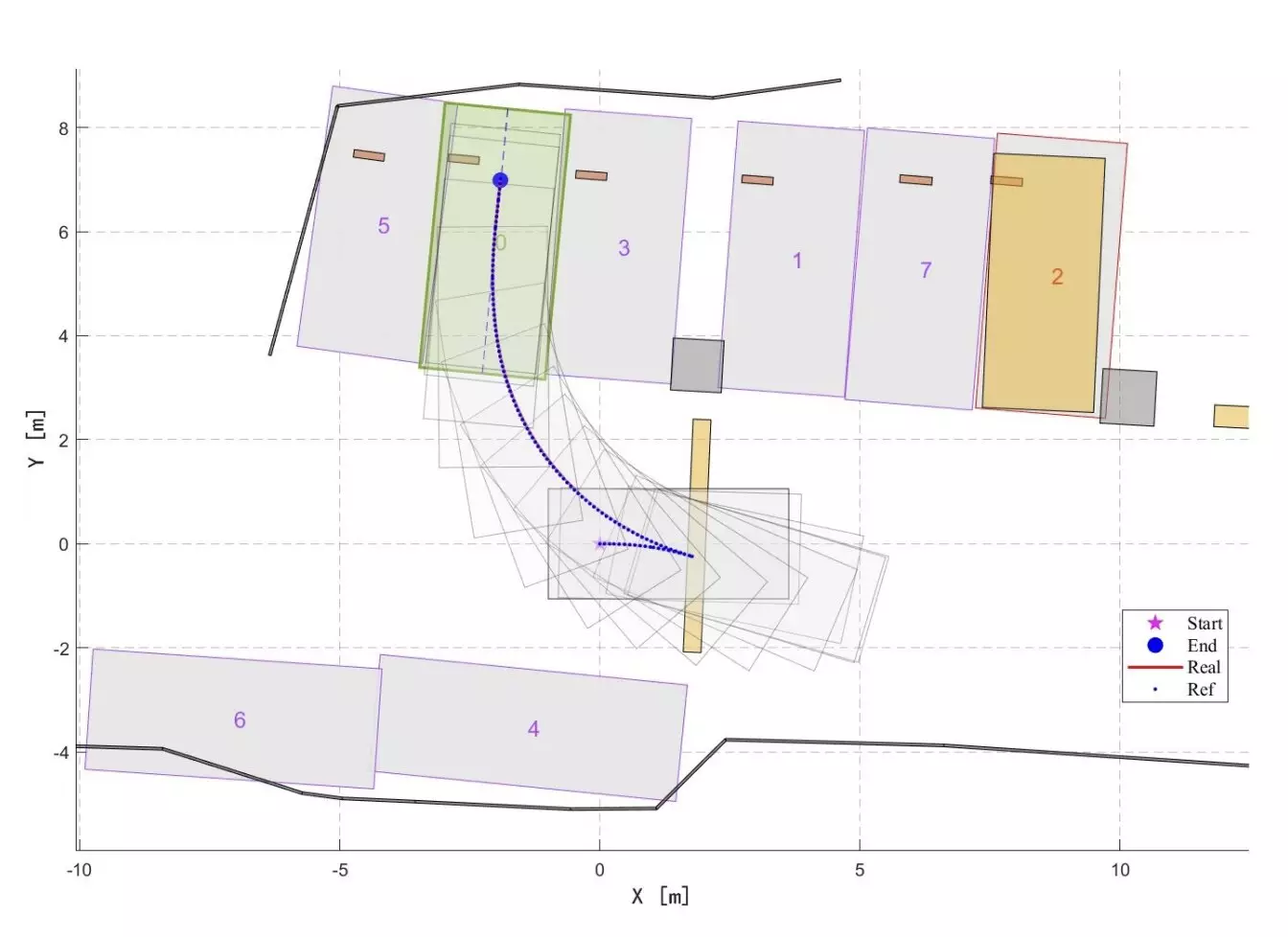
The team of researchers conducted extensive testing of the OCEAN planner, using both simulated scenarios and real-world experiments in public parking areas. The results were highly promising, showing that the OCEAN planner outperformed existing methods for autonomous parking applications. This improvement in system performance could pave the way for the deployment of large-scale parking planners on low computing power platforms, ensuring real-time performance.
While the OCEAN planner has shown great potential, there is room for further improvement and testing in additional real-world trials. Automotive companies could potentially implement this technology, leading to the widespread adoption of automated vehicle parking technologies. The continued development of autonomous parking solutions will not only enhance convenience for drivers but also contribute to the evolution of self-driving vehicles as a whole.
The development of the OCEAN planner represents a significant advancement in the field of automated valet parking technology. By addressing the limitations of existing methods and demonstrating superior performance in testing, the OCEAN planner has the potential to revolutionize the way we approach parking in the future. With further refinement and testing, this technology could soon become a common feature in parking facilities around the world, bringing us one step closer to a fully automated driving experience.
Leave a Reply