Robotic systems have traditionally been utilized in controlled indoor environments to assist with manual tasks and simple queries. However, as technology advances, there is a growing interest in deploying robotic systems in unknown and unmapped environments. These environments present unique challenges, such as obstacles that can obstruct sensors and increase the risk of collisions. One promising solution to this challenge is the development of air-ground robots that can navigate both on the ground and in the air.
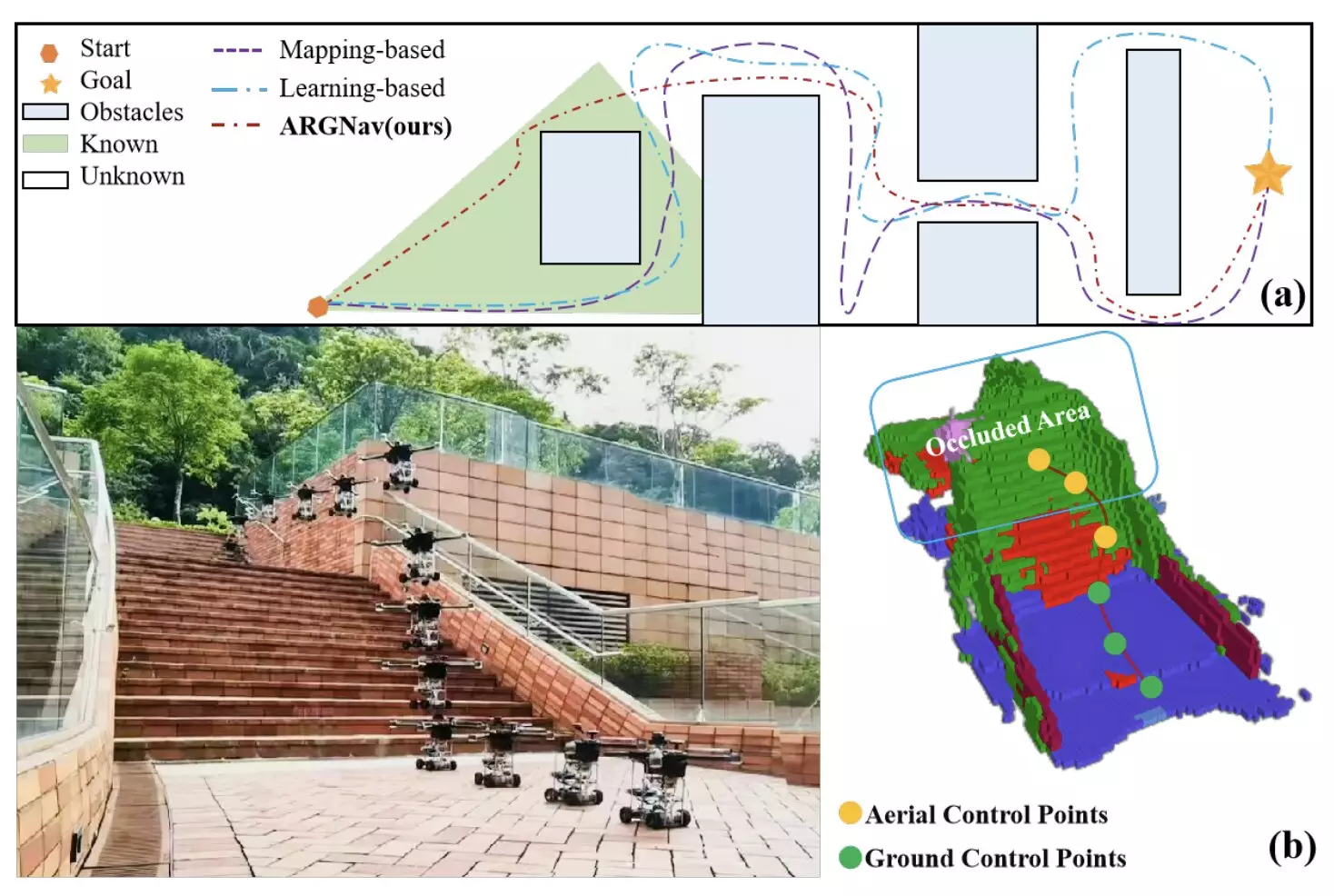
Recently, researchers at the University of Hong Kong introduced AGRNav, a new framework designed to enhance the autonomous navigation of air-ground robots in occlusion-prone environments. This framework incorporates a lightweight semantic scene completion network (SCONet) and a hierarchical path planner to predict obstacles in the environment and plan optimal paths for the robot to navigate safely and efficiently. By leveraging deep learning techniques and self-attention mechanisms, AGRNav is able to accurately predict obstacles and plan energy-saving paths for air-ground robots.
The researchers evaluated the performance of AGRNav in both simulations and real-world experiments, using a customized air-ground robot as their test platform. The results demonstrated that AGRNav outperformed existing robot navigation frameworks, providing optimal and energy-efficient paths for the robot to follow. This success can be attributed to the innovative approach of combining semantic scene completion with hierarchical path planning, enabling the robot to navigate complex environments with ease.
One of the key advantages of AGRNav is that its underlying code is open-source and available to developers worldwide on GitHub. This open-access approach allows for collaboration and further development of the framework, potentially leading to improvements and adaptations for different air-ground robotic platforms. By making the code accessible, the researchers are promoting transparency and encouraging innovation in the field of autonomous navigation for robotic systems.
Looking ahead, AGRNav has the potential to revolutionize the deployment of air-ground robotic systems in real-world environments. By providing a reliable and efficient navigation framework, AGRNav could be used for search and rescue missions, package deliveries to remote locations, environmental monitoring, and other complex tasks in outdoor settings. The versatility and effectiveness of AGRNav make it a valuable asset for enhancing the capabilities of air-ground robots in navigating complex environments.
The development of AGRNav represents a significant advancement in the field of autonomous navigation for robotic systems. By combining innovative technologies and computational approaches, researchers have created a framework that can effectively address the challenges of navigating complex and occlusion-prone environments. As robotics technology continues to evolve, frameworks like AGRNav will play a crucial role in unlocking the full potential of robotic systems in a variety of applications and industries.
Leave a Reply